

 |
Jack Ganssle's Blog This is Jack's outlet for thoughts about designing and programming embedded systems. It's a complement to my bi-weekly newsletter The Embedded Muse.
Contact me at jack@ganssle.com. I'm an old-timer engineer who still finds the field endlessly fascinating (bio).
This is Jack's outlet for thoughts about designing and programming embedded systems. It's a complement to my bi-weekly newsletter The Embedded Muse.
Contact me at jack@ganssle.com. I'm an old-timer engineer who still finds the field endlessly fascinating (bio). |
2019's Most Important Lesson
November 1, 2019
My very first engineering class in college had some silly name like "Engineering Fundamentals." I don't remember much about it, other than that we were shown a video of the Takoma Narrows bridge failing in 1940, four months after it opened. At 18 years old I thought that was a very cool film. Decades later I'm struck that this disaster was used to educate hundreds of thousands of engineers about the perils of that particular failure mode.
We can learn from the disasters of other engineers.
We must learn from the disasters of other engineers.
I have a huge file of disasters in the embedded field and share some of those in my seminars, as only a fool would want to repeat mistakes made in the past. Your errors can teach others things to avoid.
2019 provided us with a truly remarkable example of this. The 737 Max crashes teach many lessons. To me, the most important is the peril of believing sensor data. The angle-of-attack sensor started giving truly bizarre readings, yet the computer accepted those as legit.
Sensors fail. That should be a meme burned brightly into our psyches.
A mistake we make is to believe sensor data. Or to smooth it, perhaps averaging some number of samples. An average of garbage is still garbage.
Consider this excerpt from the flight data recorder on the Ethiopian Airlines crash:
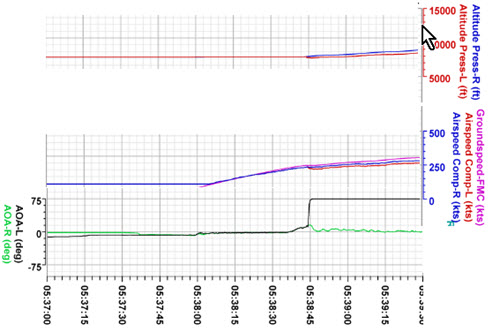
The AOA sensor went from zero to 75 degrees in under one second. That in itself is unbelievable, and the software should have rejected it. But the altitude didn't change; if the aircraft were pointed up, it would probably go up. The airspeed remained mostly constant. At 75 degrees up angle airspeed would have bled off faster than a vampire relishing his first kill of the night.
The flight data recorder had 1790 channels of data fed to it. One gave an absurd value; many of the others contradicted that. Had the software evaluated the AOA sensor against the other channels it could have behaved more reasonably. Even absent the other data, comparing the 75 degree rotation in less than a second to a physical model of what a commercial aircraft can do would have sounded alarms.
The moral for all of us embedded people: Always compare sensor data to the physics and to other inputs. If it seems odd, respond appropriately. Here's a handful of other cases where crummy code gave stupid results. I have hundreds of other examples:




Two takeaways:
- Check your sensor data for reasonableness
- Check your outputs for sanity
Back to Jack's blog index page.
If you'd like to post a comment without logging in, click in the "Name" box under "Or sign up with Disqus" and click on "I'd rather post as a guest."
Recent blog postings:
- Non Compos Mentis - Thoughts on dementia.
- Solution to the Automotive Chip Shortage - why use an MCU when a Core I7 would work?
- The WIRECARE - A nice circuit tester
- Marvelous Magnetic Machines - A cool book about making motors
- Over-Reliance on GPS - It's a great system but is a single point of failure
- Spies in Our Email - Email abuse from our trusted friends
- A Canticle for Leibowitz - One of my favorite books.
- A 72123 beats per minute heart rate - Is it possible?
- Networking Did Not Start With The IoT! - Despite what the marketing folks claim
- In-Circuit Emulators - Does anyone remember ICEs?
- My GP-8E Computer - About my first (working!) computer
- Humility - On The Death of Expertise and what this means for engineering
- On Checklists - Relying on memory is a fool's errand. Effective people use checklists.
- Why Does Software Cost So Much? - An exploration of this nagging question.
- Is the Future All Linux and Raspberry Pi? - Will we stop slinging bits and diddling registers?
- Will Coronavirus Spell the End of Open Offices - How can we continue to work in these sorts of conditions?
- Problems in Ramping Up Ventilator Production - It's not as easy as some think.
- Lessons from a Failure - what we can learn when a car wash goes wrong.
- Life in the Time of Coronavirus - how are you faring?
- Superintelligence - A review of Nick Bostrom's book on AI.
- A Lack of Forethought - Y2K redux
- How Projects Get Out of Control - Think requirements churn is only for software?
- 2019's Most Important Lesson. The 737 Max disasters should teach us one lesson.
- On Retiring - It's not quite that time, but slowing down makes sense. For me.
- On Discipline - The one thing I think many teams need...
- Data Seems to Have No Value - At least, that's the way people treat it.
- Apollo 11 and Navigation - In 1969 the astronauts used a sextant. Some of us still do.
- Definitions Part 2 - More fun definitions of embedded systems terms.
- Definitions - A list of (funny) definitions of embedded systems terms.
- On Meta-Politics - Where has thoughtful discourse gone?
- Millennials and Tools - It seems that many millennials are unable to fix anything.
- Crappy Tech Journalism - The trade press is suffering from so much cost-cutting that it does a poor job of educating engineers.
- Tech and Us - I worry that our technology is more than our human nature can manage.
- On Cataracts - Cataract surgery isn't as awful as it sounds.
- Can AI Replace Firmware - A thought: instead of writing code, is the future training AIs?
- Customer non-Support - How to tick off your customers in one easy lesson.
- Learn to Code in 3 Weeks! - Firmware is not simply about coding.
- We Shoot For The Moon - a new and interesting book about the Apollo moon program.
- On Expert Witness Work - Expert work is fascinating but can be quite the hassle.
- Married To The Team - Working in a team is a lot like marriage.
- Will We Ever Get Quantum Computers - Despite the hype, some feel quantum computing may never be practical.
- Apollo 11, The Movie - A review of a great new movie.
- Goto Considered Necessary - Edsger Dijkstra recants on his seminal paper
- GPS Will Fail - In April GPS will have its own Y2K problem. Unbelievable.
- LIDAR in Cars - Really? - Maybe there are better ideas.
- Why Did You Become an Engineer? - This is the best career ever.
- Software Process Improvement for Firmware - What goes on in an SPI audit?
- 50 Years of Ham Radio - 2019 marks 50 years of ham radio for me.
- Medical Device Lawsuits - They're on the rise, and firmware is part of the problem.
- A retrospective on 2018 - My marketing data for 2018, including web traffic and TEM information.
- Remembering Circuit Theory - Electronics is fun, and reviewing a textbook is pretty interesting.
- R vs D - Too many of us conflate research and development
- Engineer or Scientist? - Which are you? John Q. Public has a hard time telling the difference.
- A New, Low-Tech, Use for Computers - I never would have imagined this use for computers.
- NASA's Lost Software Engineering Lessons - Lessons learned, lessons lost.
- The Cost of Firmware - A Scary Story! - A hallowean story to terrify.
- A Review of First Man, the Movie - The book was great. The movie? Nope.
- A Review of The Overstory - One of the most remarkable novels I've read in a long time.
- What I Learned About Successful Consulting - Lessons learned about successful consulting.
- Low Power Mischief - Ultra-low power systems are trickier to design than most realize.
- Thoughts on Firmware Seminars - Better Firmware Faster resonates with a lot of people.
- On Evil - The Internet has brought the worst out in many.
- My Toothbrush has Modes - What! A lousy toothbrush has a UI?
- Review of SUNBURST and LUMINARY: An Apollo Memoir - A good book about the LM's code.
- Fun With Transmission Lines - Generating a step with no electronics.
- On N-Version Programming - Can we improve reliability through redundancy? Maybe not.
- On USB v. Bench Scopes - USB scopes are nice, but I'll stick with bench models.